




















 
|
A travessia automática do braço robótico pega a máquina para cabos de fibra ótica exteriores
Detalhes do produto:
| Lugar de origem: | China |
| Marca: | I-suntop |
| Certificação: | SGS |
Condições de Pagamento e Envio:
| Quantidade de ordem mínima: | 1set |
|---|---|
| Preço: | By negotiation |
| Detalhes da embalagem: | Caixa plástica de film+wooden |
| Tempo de entrega: | Dias de Min.50working |
| Termos de pagamento: | L/C, T/T |
| Habilidade da fonte: | 10sets/month |
|
Informação detalhada |
|||
| Velocidade de enrolamento: | Máximo 100m/min | Tensão de enrolamento: | 30N~300N |
|---|---|---|---|
| Diâmetro do carretel: | 800-1600mm | Diâmetro do cabo ótico: | 6-18mm |
| Tamanho do poder: | 2KVA, fio da C.A. 3phase+N wire+ground de 380V 50Hz | Serviço: | garantia 12month |
| Destacar: | a travessia 300N automática pega a máquina,A travessia 2KVA pega a máquina |
||
Descrição de produto
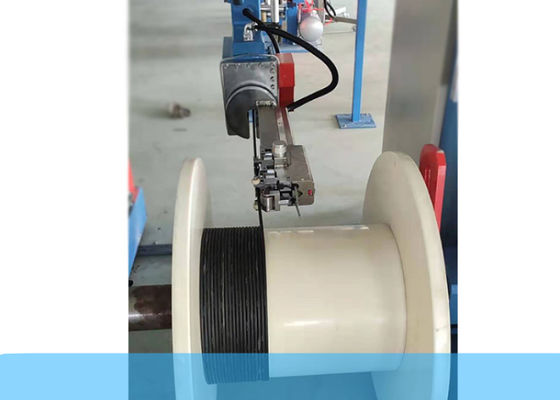
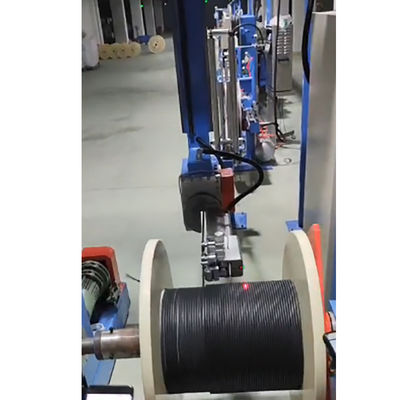
A travessia automática do braço robótico pega a máquina para cabos de fibra ótica exteriores
máquina 20220228.pdf do cabo de fibra ótica do i-suntop
aplicação 1.Equipment
Esta máquina usada principalmente atravessando e tomando acima de todos os cabos, segurança ótima, nos cabos manuais da tomada-acima do lugar, reduzindo os riscos para a segurança. E ele para não assegurar a qualidade de enrolamento uniforme e o nenhum cruzamento do cabo.
parâmetros 2.Technical
| Velocidade de enrolamento | Máximo 100m/min |
| Tensão de enrolamento | 30N~300N |
| Diâmetro do carretel | 0.8M~1.6M |
| Tambor | 400mm mínimos |
| Diâmetro do produto | 6-18mm (pode ajustar) |
| Poder |
1.5KW |
especificação 3.Main e desempenho
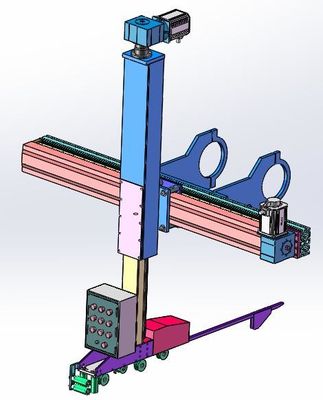
Dispositivo transversal do braço de A.Robot
A estrutura é um manipulador suspendido, que seja integrado no fio à terra do pórtico do trilho pegue o quadro para salvar o espaço vazio da instalação. A indicação relativa da transformação é dividida na linha central de X e na linha central de Y. A linha central de X é o sentido transversal horizontal, e a linha central de Y é o sentido de aumentação vertical. Nenhuma intervenção humana é exigida em processo da travessia;
Maneira transversal: Travessia linear do parafuso da bola do trilho de guia +TBI do servo motor +HIWIN de Panasonic; É mais estável do que o tipo tradicional do pórtico e tem menos erro. É mais em ordem. O levantamento automático do braço do robô é detectado pelo sensor, de modo que o ângulo entre o braço do robô e a bobina do fio seja sempre consistente, e a travessia é pura. A estrutura de levantamento da Y-linha central é composta da engrenagem de cremalheira helicoidal especial linear do trilho de guia da trilha +YYC da corrediça do servo motor +HIWIN de panasonic. Estrutura compacta, operação lisa
●Servo motor transversal do motor 1KW panasonic
●Servo motor do motor 1KW panasonic de Lifiting
●HIWIN Taiwan HIWIN
●parafuso transversal Taiwan TBI da bola
●Cremalheira de levantamento Taiwan YYC
●curso transversal horizontal 1300mm da X-linha central
●Curso de aumentação vertical 1050mm da linha central de Y
![]()